PERC
Biologically inspired underwater vehicle characterization

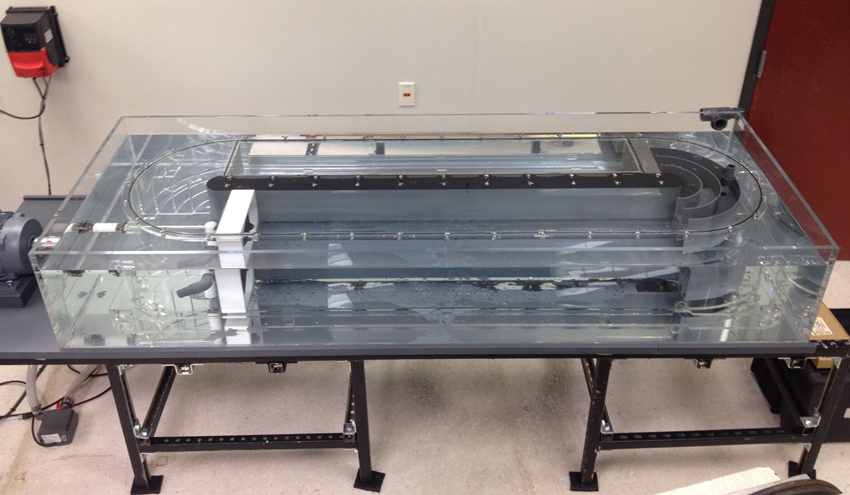
A 15 foot tall, 26 foot diameter (60,000 gallon) testing tank provides a controlled environment to test and characterize small underwater vehicles. The tank is also used to field test and verify the design underwater sensors such as an acoustic modem and a lateral line inspired flow sensor.
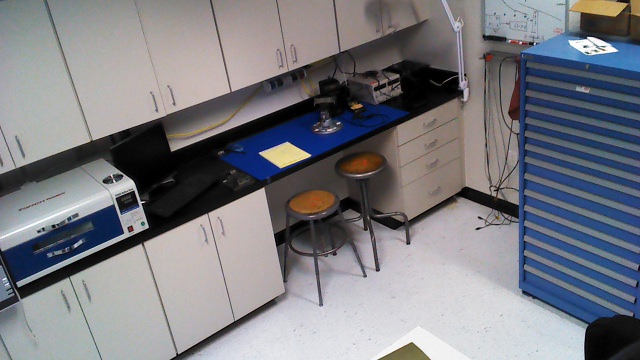
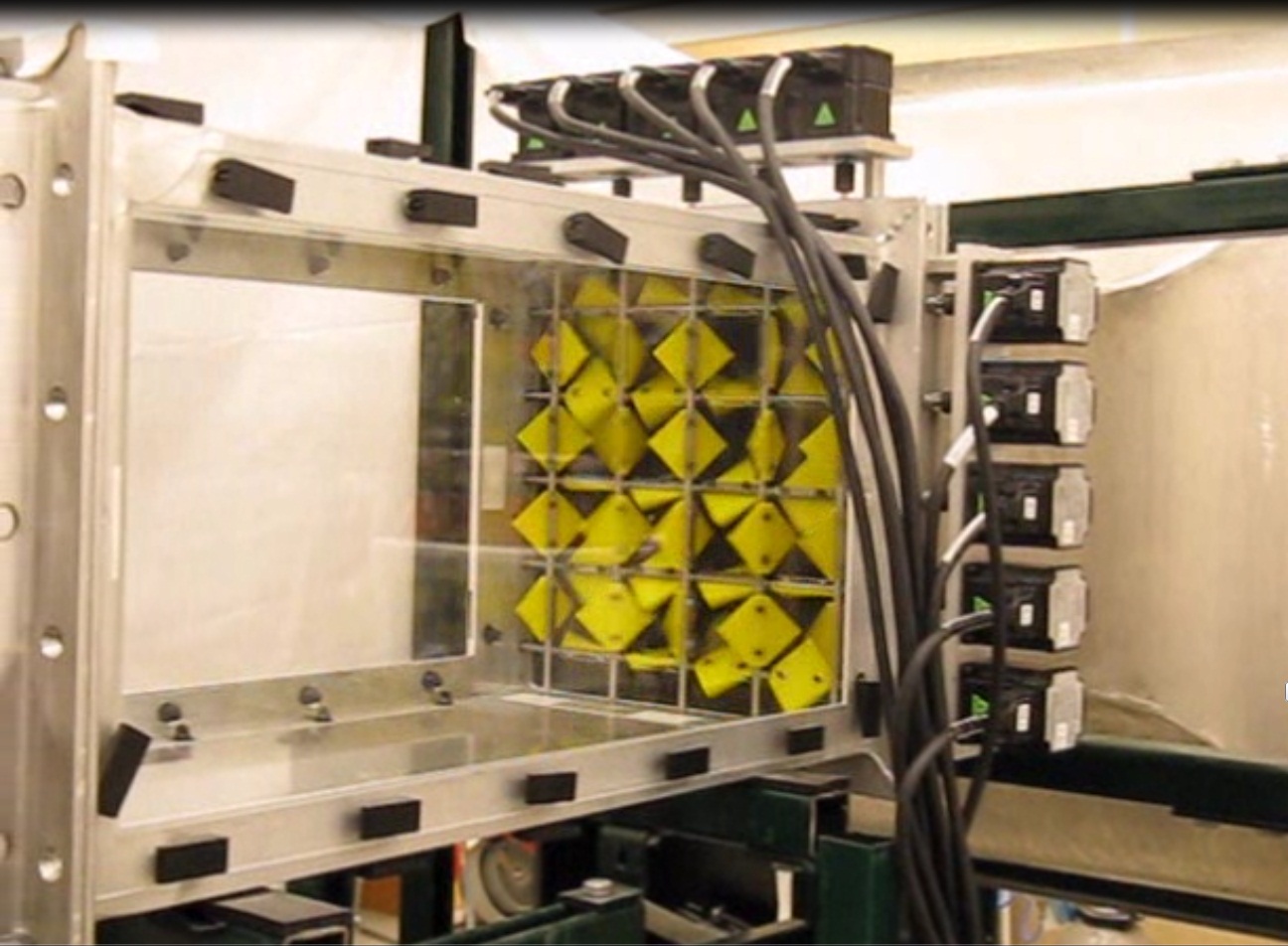
An additional rectangular tank is used to experimentally characterize design iterations of the Vortex Ring Thursters (VRTs). The thruster tank is made of clear acrylic which allows for visual access and Particle image velocimetry (PIV) to analyze the fluid motion during thruster actuation.
Old vehicles
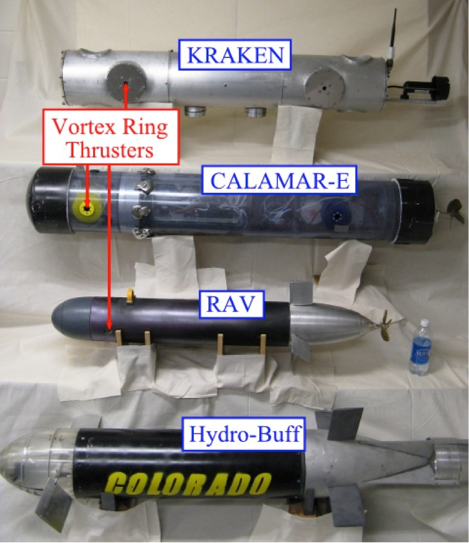
First four generations of AUV
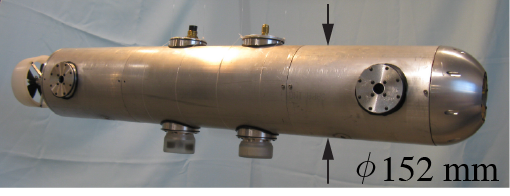
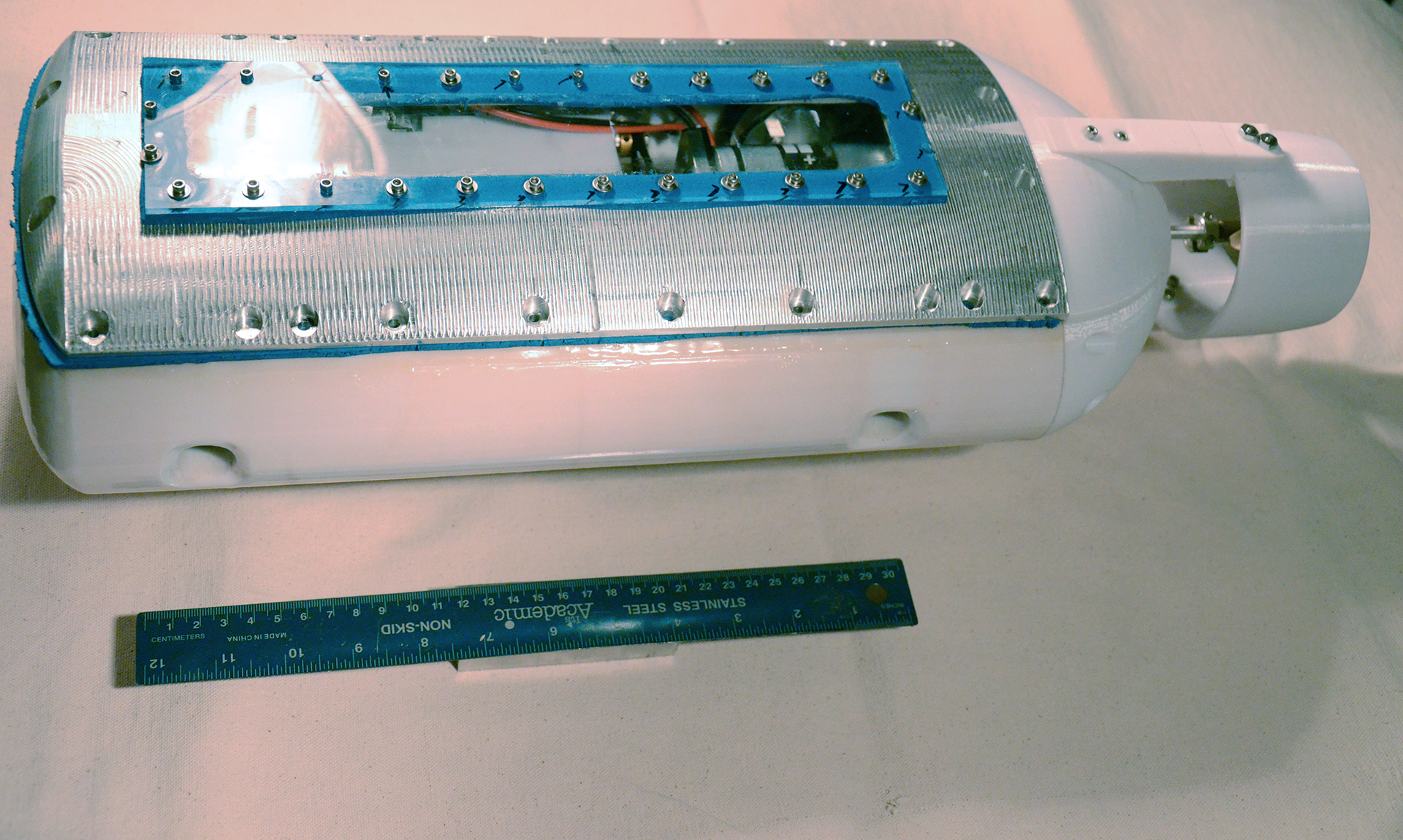
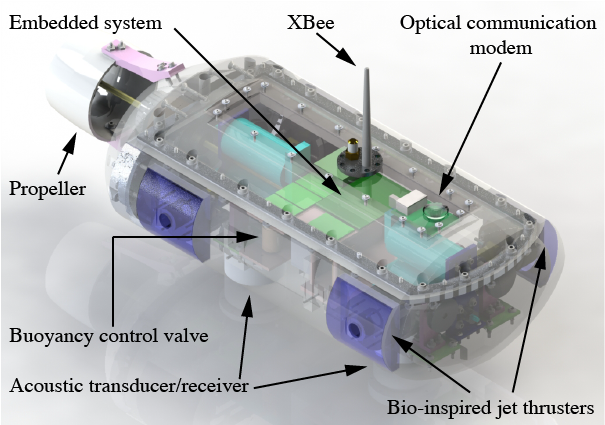
CephaloBot
A hybrid class underwater vehicle, CephaloBot, with bio-inspired propulsion, embedded system, and acoustic communication and localization system.
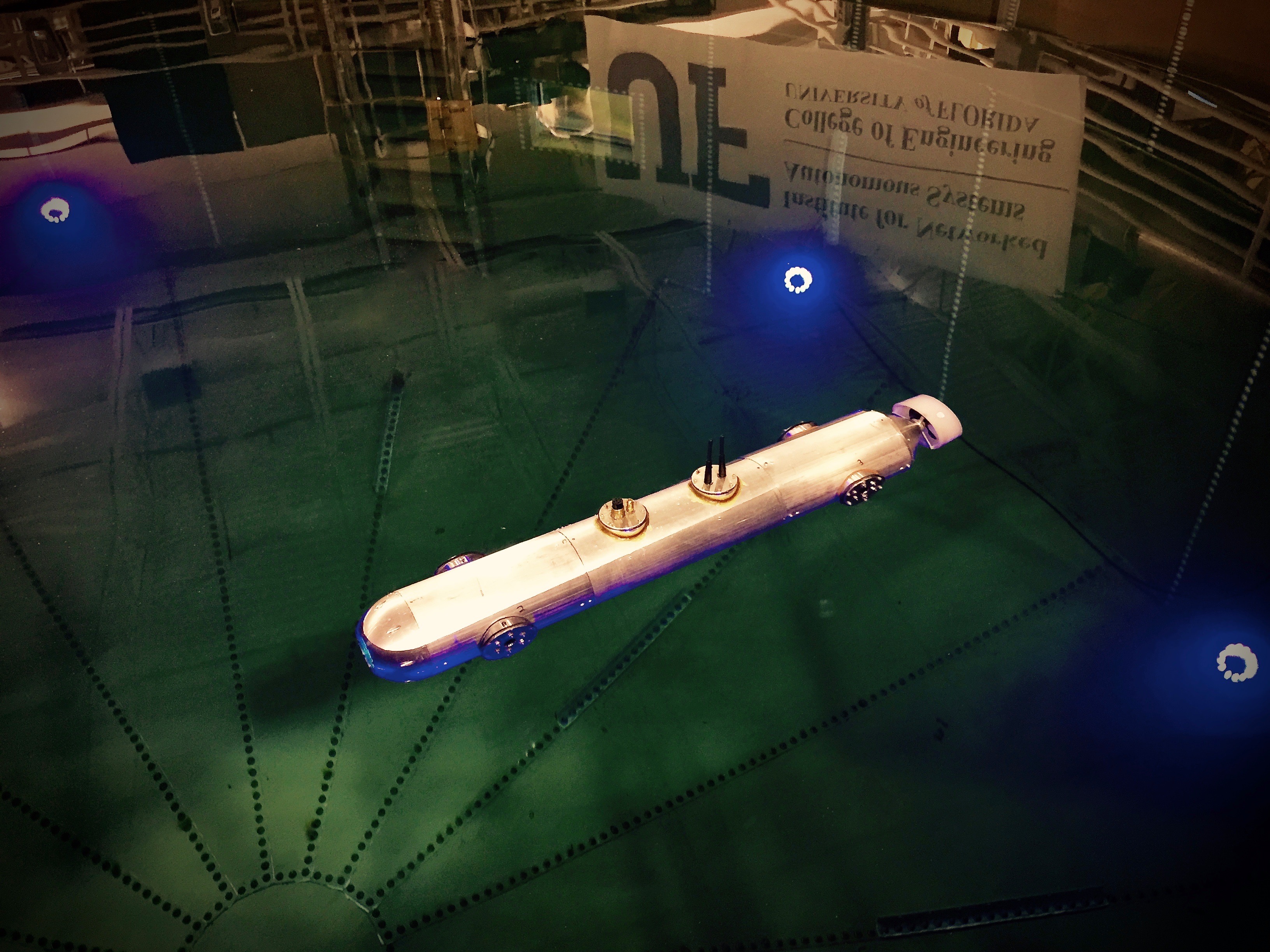
CephaloBot during underwater testing where its motion was recorded by Qualisys underwater motion capture system.
Daughter AUV
After 5 generations of autonomous AUV development we finished the design fabrication and testing of the first iteration of miniature Daughter AUV.
3D rendering of the second iteration of the Daughter AUV.
Micro Aerial Vehicle characterization
The Prototunnel is a low speed open circuit/closed jet wind tunnel uniquely suited for experimental investigations of the flight conditions of Micro Aerial Vehicles (MAVs), which fly in a poorly understood regime that is fundamentally different than conventional aircraft. The inherently low velocities of MAVs allow full scale model testing in the tunnel, thus exactly replicating the flow phenomena experienced by low Reynolds number fliers. Furthermore, the Prototunnel can be outfitted with an active grid gust generator which creates high wavelength (low frequency) turbulence with length scales on the same order as the characteristic dimensions of the MAV. Models are dynamically actuated using the Model Positioning System (MPS), designed and built by the group to permit coupled four degree-of-freedom motion which mimics the highly maneuverable flight of MAVs. Utilization of six-component force balance data, Particle Image Velocimetry (PIV), smokewire flow visualization and hotwire anemometry allows our researchers to develop a comprehensive understanding of the complex, interactive flow associated with these versatile aircraft and to use this knowledge to improve the design and control of MAVs for use in sensor networking. The below video shows the gust generator and the model positioning system making a pitch manuever of a MAV.
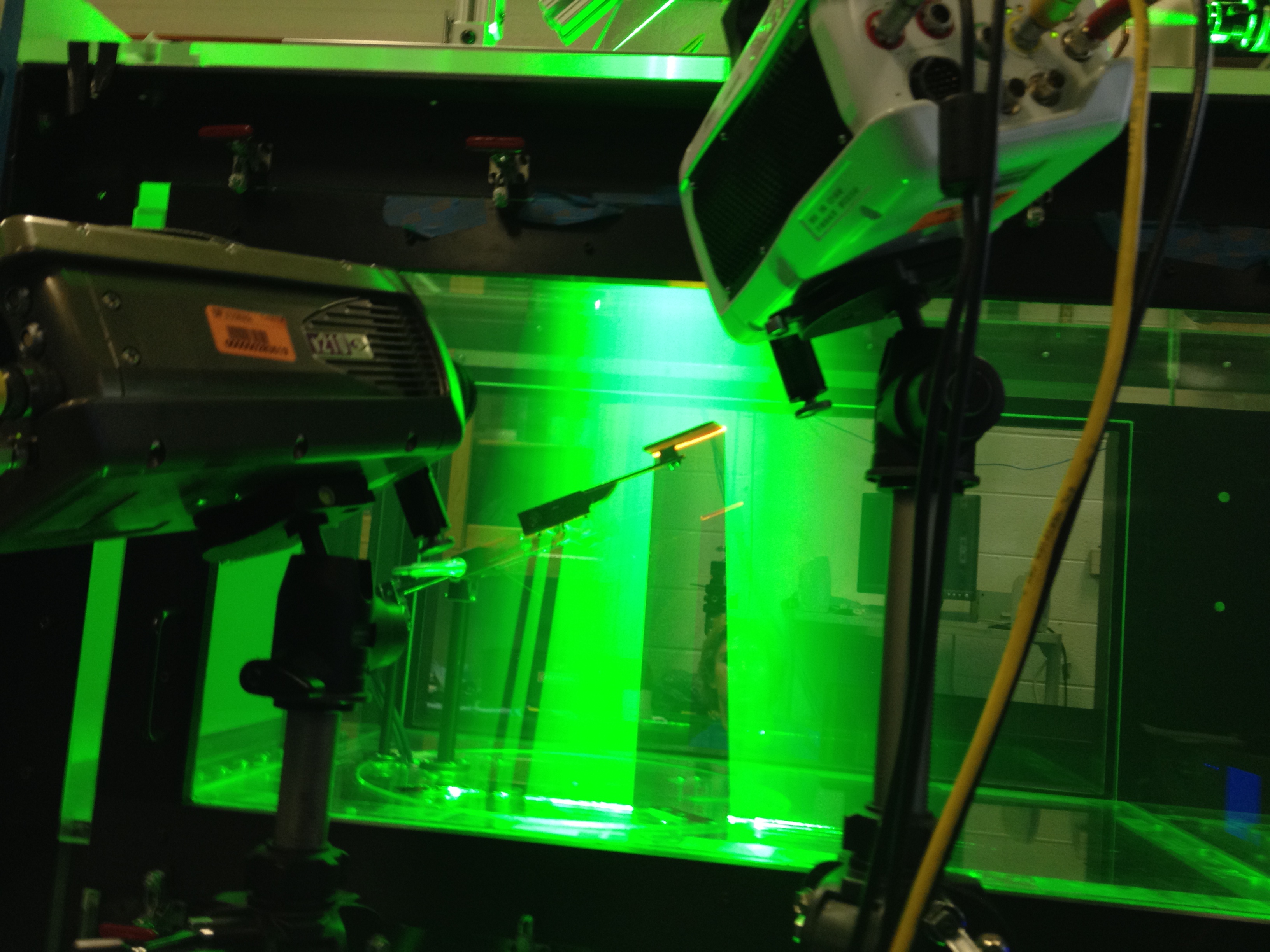
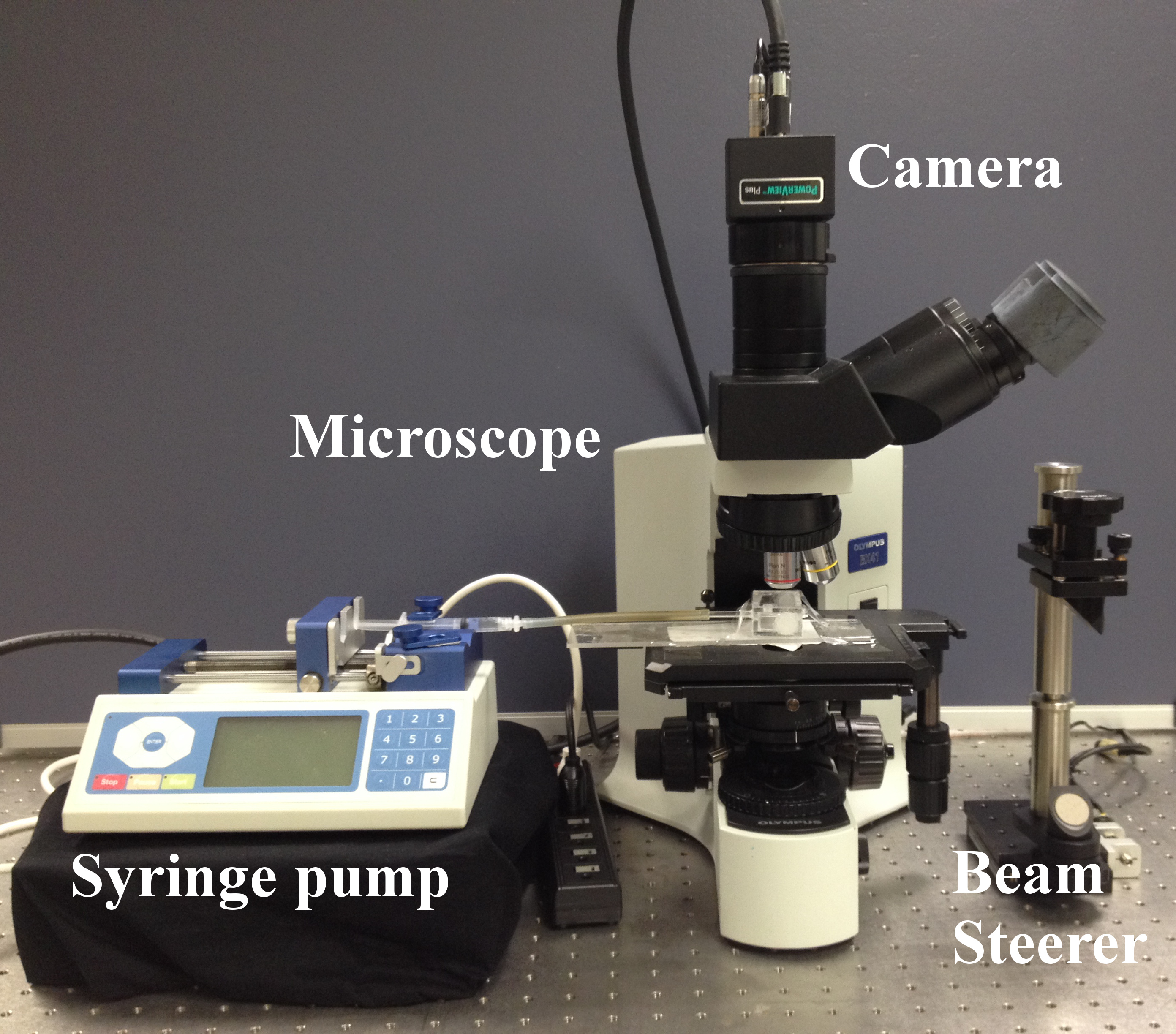
Laser Induced Fluoresence
LIF uses a fluorescent dye (typically Rhodamine B) which is excited by laser light and emits light energy at a wavelength different from that of the laser. This technique may be used for several purposes. For example, LIF provides high-contrast flow visualizations and has the ability to tag the flow within a certain plane when a laser light sheet is used (PLIF). Another use is temperature field measurement whereby a dye that has a temperature-dependent fluorescence is used to indicate local temperatures in the fluid.
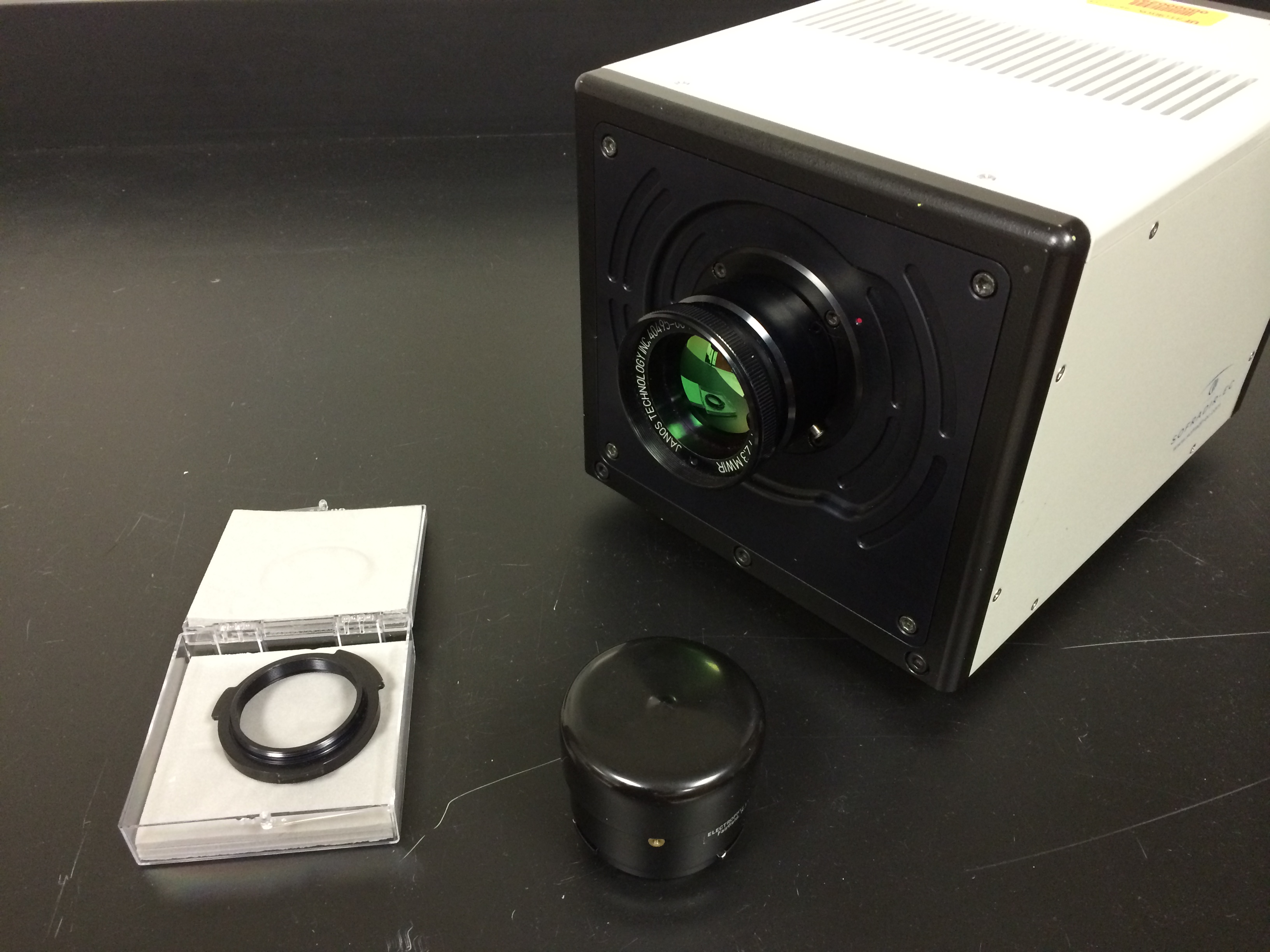
Laser Doppler Velocimetry system
LDV is a non-intrusive, point-wise velocity measurement. The main components of the system are a 6 W continuous wave Argon laser, a mulit-color (wavelength) beam splitter, and transmitting/receiving optics. LDV is often used for turbulence measurements and can also provide accurate measurements of very high-speed flows.