Research Timeline
Click on an event to see more details.
-
2017
-
Distributed robotic swarm control
using fluid abstraction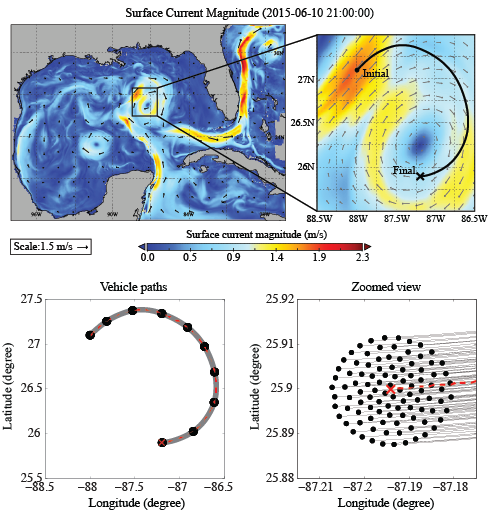 Z. Song, D Lipinski, and K. Mohseni, Multi-vehicle cooperation and nearly fuel optimal flock guidance in strong background flows, Ocean Engineering 141, 388-407, 2017 PDF
Z. Song, D Lipinski, and K. Mohseni, Multi-vehicle cooperation and nearly fuel optimal flock guidance in strong background flows, Ocean Engineering 141, 388-407, 2017 PDF -
Jellyfish inspired real-time
underwater visual guidance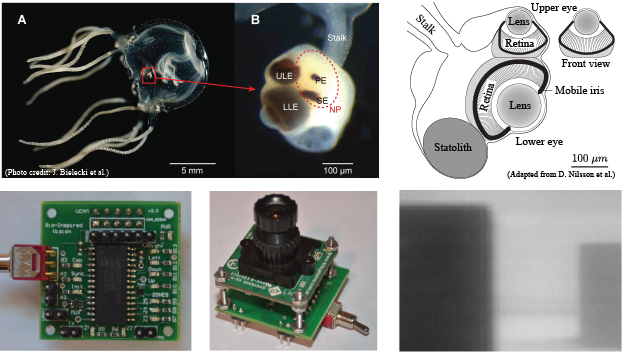 Z. Song, E Schwartz, and K. Mohseni, Bioinspired visual guidance in turbid underwater environment, Proceedings of the IEEE Sensors conference Glasgow, Scotland, UK, Oct 2017
Z. Song, E Schwartz, and K. Mohseni, Bioinspired visual guidance in turbid underwater environment, Proceedings of the IEEE Sensors conference Glasgow, Scotland, UK, Oct 2017 -
5gm autopilot with dual radio for
MAVs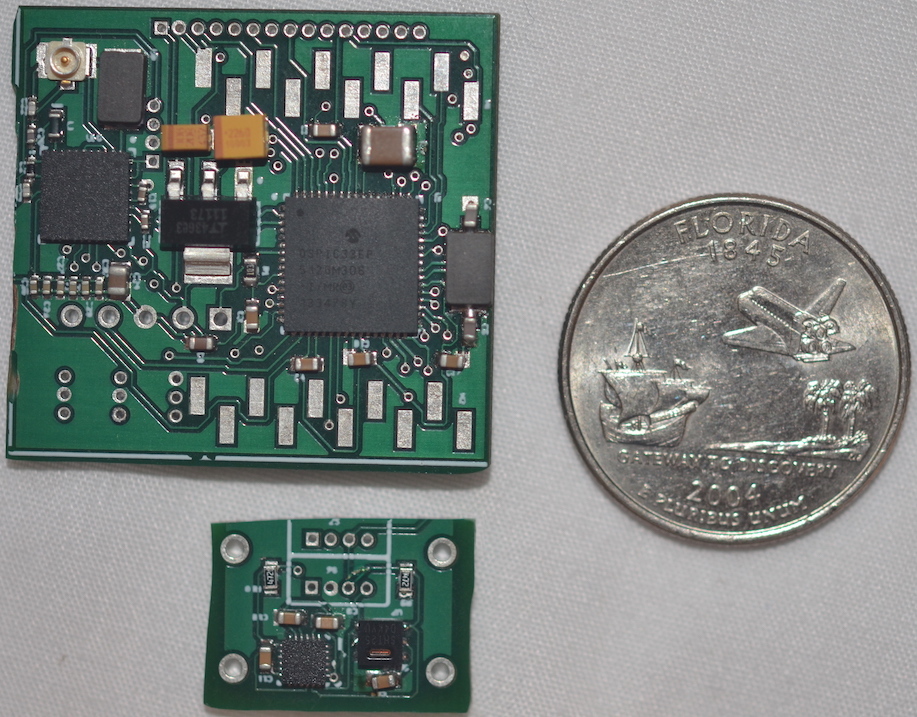 A. Bingler and K. Mohseni, AMP: Lightweight, Low-Resource Autopilot System for Micro/Miniature Mobile Sensing Platforms, Journal of Aerospace Information Systems (accepted for publication), 2016
A. Bingler and K. Mohseni, AMP: Lightweight, Low-Resource Autopilot System for Micro/Miniature Mobile Sensing Platforms, Journal of Aerospace Information Systems (accepted for publication), 2016 -
Long-term inertial navigation aided
by dynamics of field features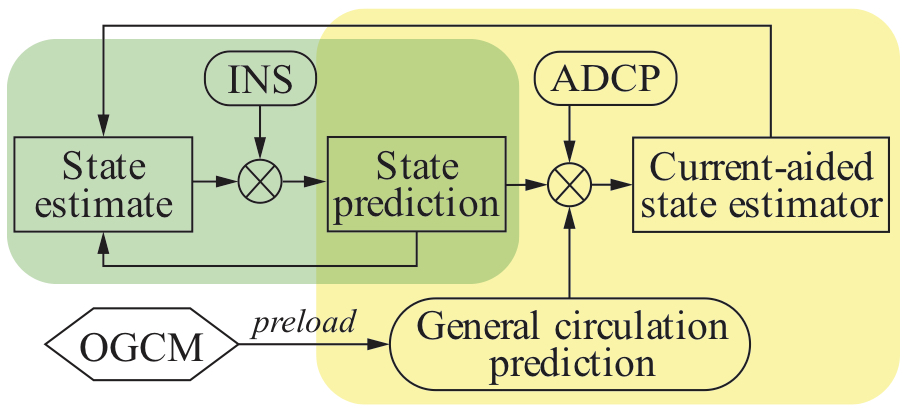 Z. Song and K. Mohseni, Long-term Inertial Navigation Aided by Dynamics of Field Features, IEEE Journal of Oceanic Engineering pp(99):1-15, 2017
Z. Song and K. Mohseni, Long-term Inertial Navigation Aided by Dynamics of Field Features, IEEE Journal of Oceanic Engineering pp(99):1-15, 2017 -
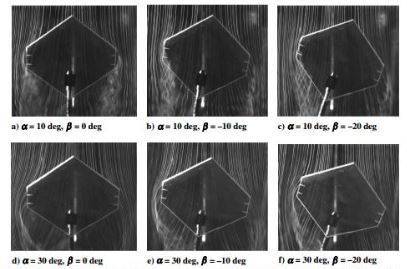
High-incidence lift generation
of low-AR wings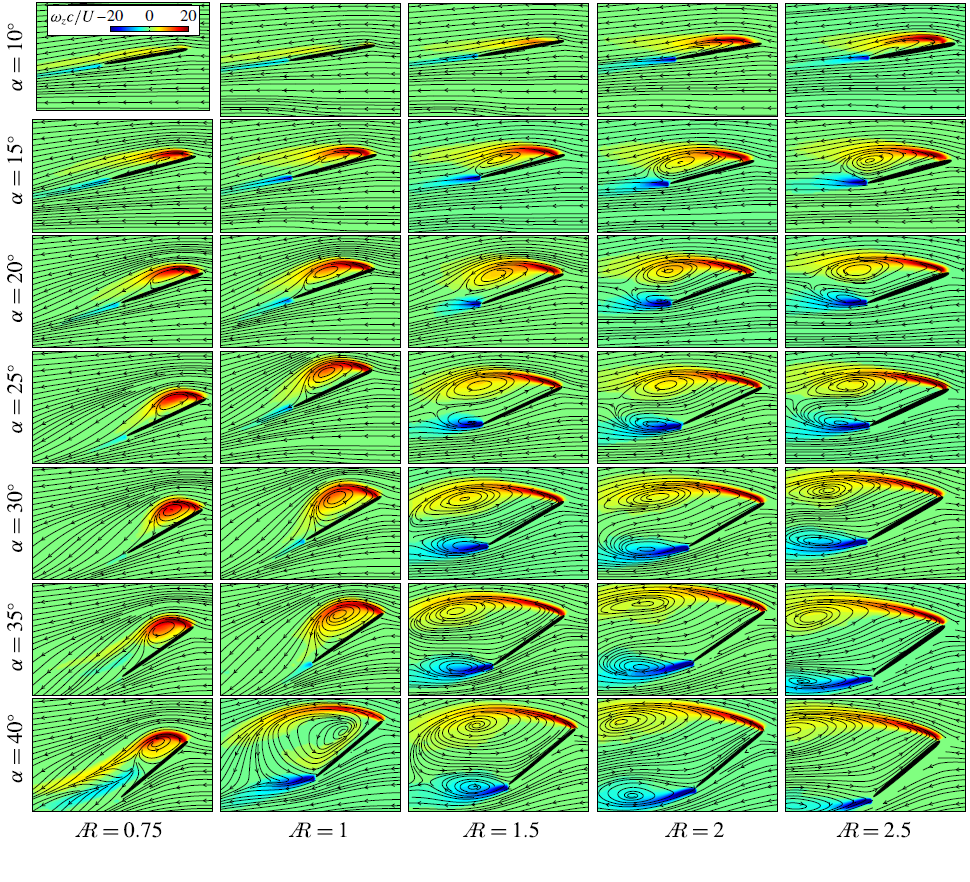 A.C. DeVoria, and K. Mohseni, On the mechanism of high-incidence lift generation for steadily translating low-aspect-ratio wings, Journal of Fluid Mechanics, 813, 110-126, 2017 PDF
A.C. DeVoria, and K. Mohseni, On the mechanism of high-incidence lift generation for steadily translating low-aspect-ratio wings, Journal of Fluid Mechanics, 813, 110-126, 2017 PDF -
Parabolic loading distribution of
reattached flow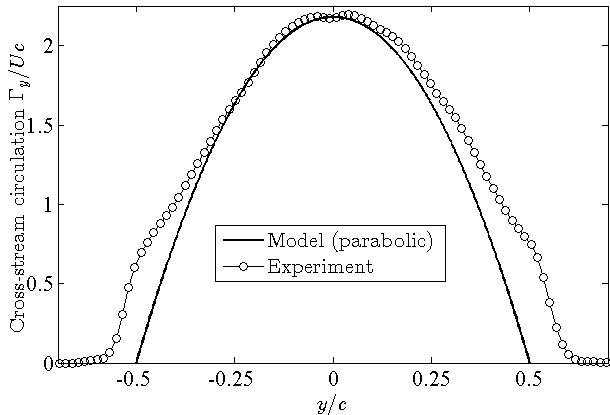 A.C. DeVoria, and K. Mohseni, A vortex model for forces and moments on low-aspect-ratio wings in side-slip with experimental validation, Proceedings of the Royal Society A, (accepted for publication), 2017
A.C. DeVoria, and K. Mohseni, A vortex model for forces and moments on low-aspect-ratio wings in side-slip with experimental validation, Proceedings of the Royal Society A, (accepted for publication), 2017
-
-
2016
-
Unified theory of far-field for round
jets (synthetic & continuous)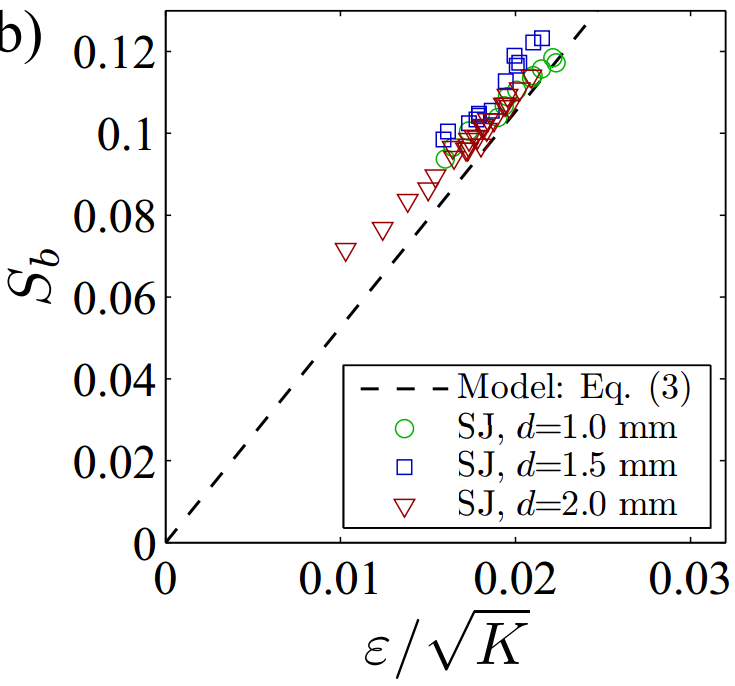 X. Xia and K. Mohseni, Parameter governing the far-field features of round jets, Physical Review Fluids, 1(6), 062401, 2016 PDF
X. Xia and K. Mohseni, Parameter governing the far-field features of round jets, Physical Review Fluids, 1(6), 062401, 2016 PDF -
Symplectic model reduction of
Hamiltonian systems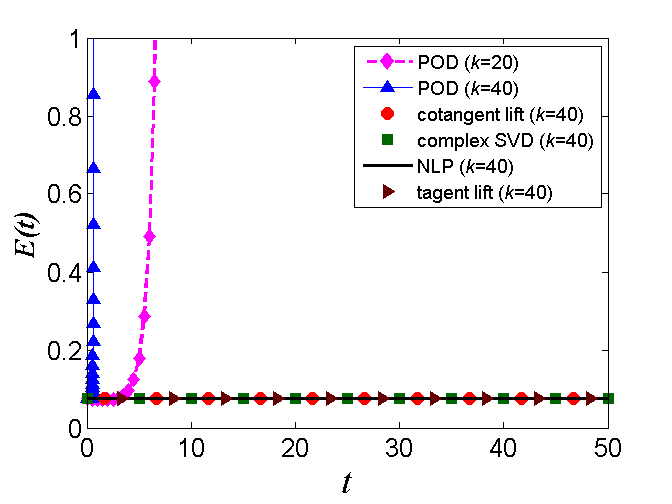 L. Peng and K. Mohseni, Symplectic model reduction of Hamiltonian systems, SIAM Journal on Scientific Computing, 38(1), A1-A27, 2016 PDF
L. Peng and K. Mohseni, Symplectic model reduction of Hamiltonian systems, SIAM Journal on Scientific Computing, 38(1), A1-A27, 2016 PDF -
Fish lateral line sensory system
for wall detection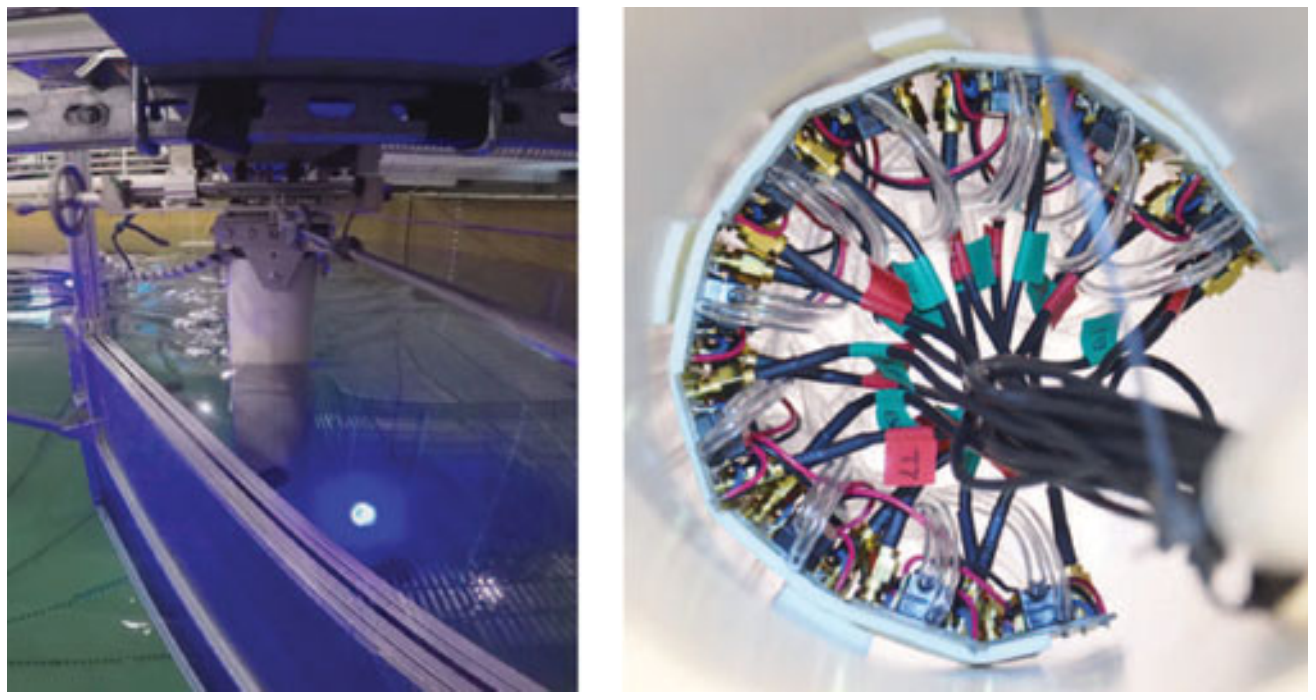 Y. Xu and K. Mohseni, A pressure sensory system inspired by the fish lateral line: Hydrodynamic force estimation and wall detection, IEEE Journal of Oceanic Engineering, 2016 PDF
Y. Xu and K. Mohseni, A pressure sensory system inspired by the fish lateral line: Hydrodynamic force estimation and wall detection, IEEE Journal of Oceanic Engineering, 2016 PDF -
Unified slip boundary condition
for fluid flows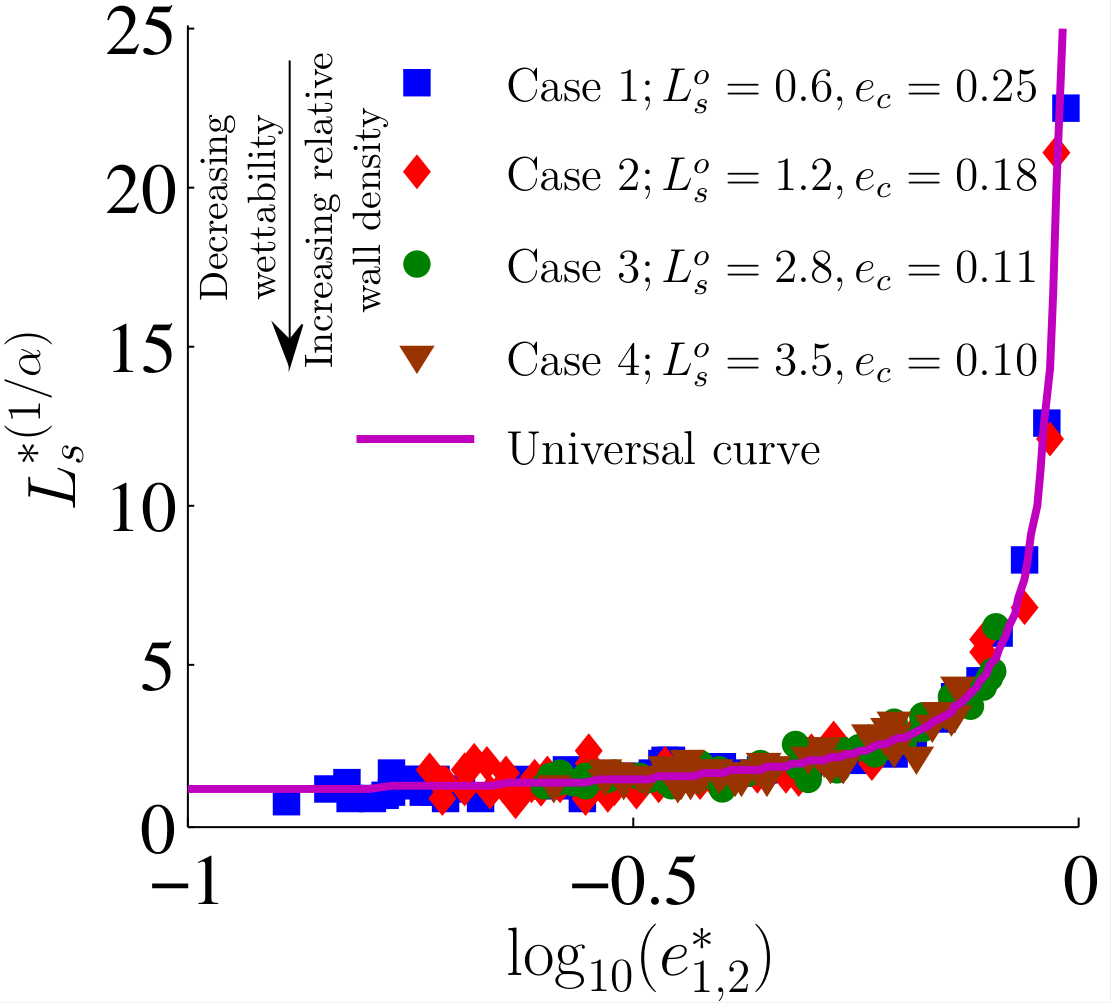 J.J. Thalakkottor and K. Mohseni, Unified slip boundary condition for fluid flows, Physical Review E, 94, 023113, 2016 PDF
J.J. Thalakkottor and K. Mohseni, Unified slip boundary condition for fluid flows, Physical Review E, 94, 023113, 2016 PDF -
New Bio-inspired Miniature
Autonomous Underwater vehicle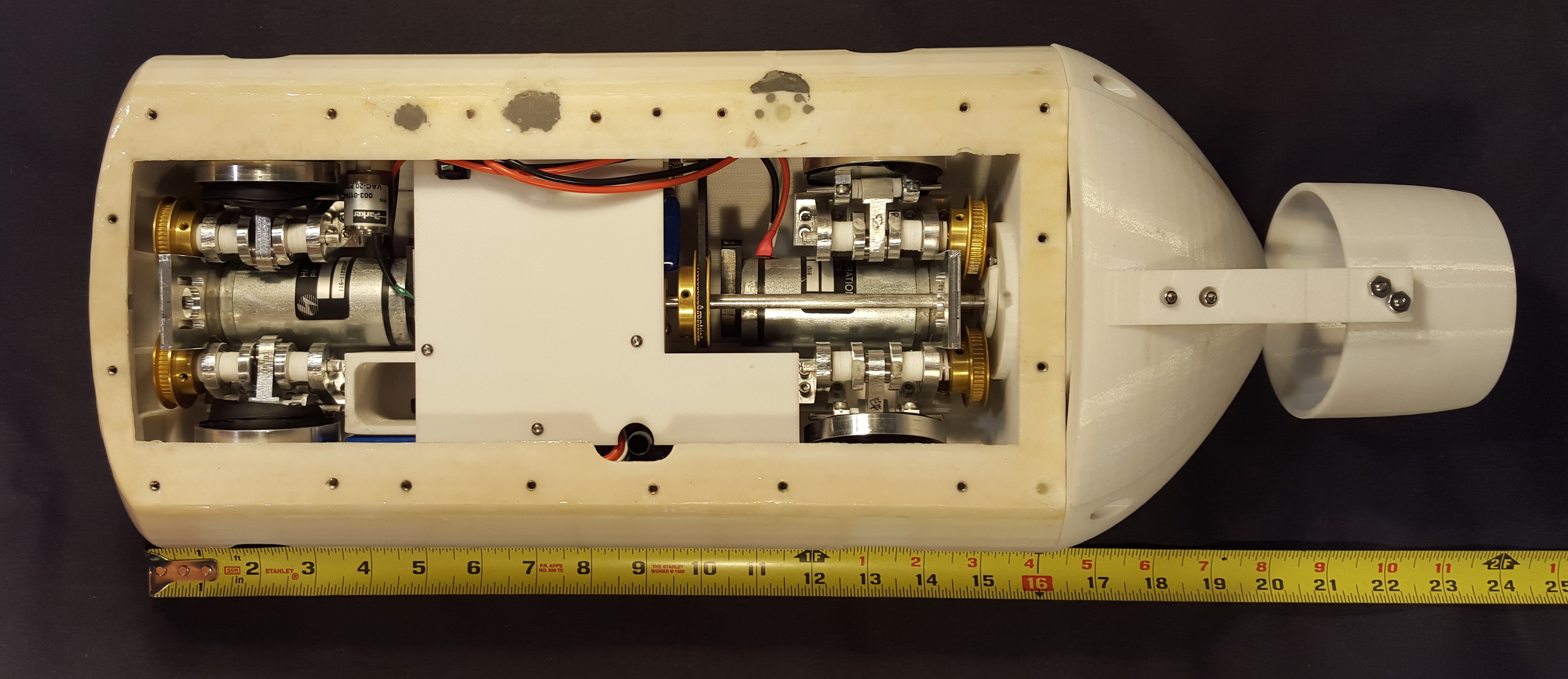 After 5 generations of autonomous AUV development we finished the design fabrication and testing of the first generation of miniature Daughter AUV PDF
After 5 generations of autonomous AUV development we finished the design fabrication and testing of the first generation of miniature Daughter AUV PDF
-
-
2015
-
MAV guidance in hurricane
and corridors of transport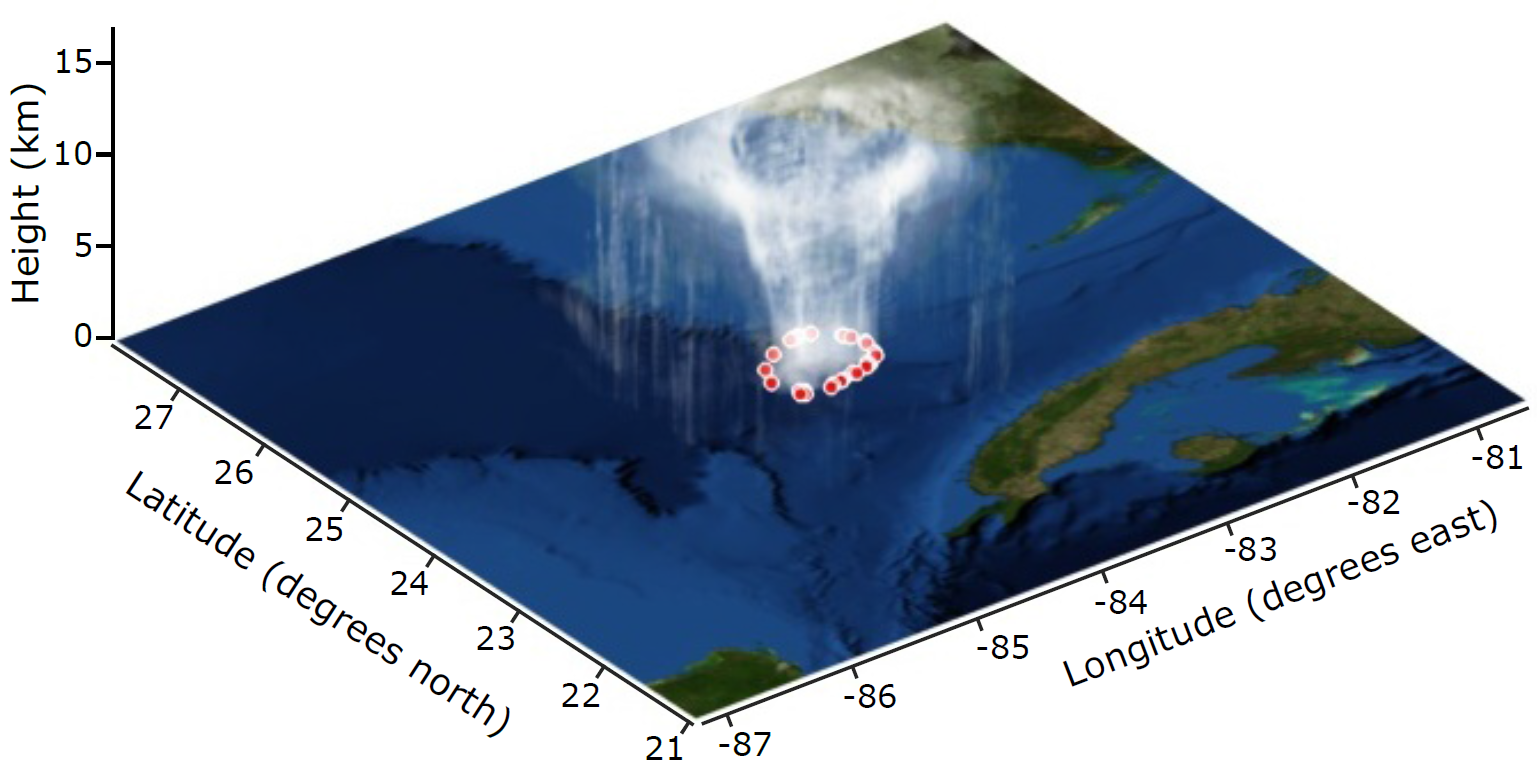 D. Lipinski and K. Mohseni, Micro/Miniature Aerial Vehicle (MAV) guidance for hurricane research, IEEE Systems Journal 10(3),1263-1270, 2015 PDF
D. Lipinski and K. Mohseni, Micro/Miniature Aerial Vehicle (MAV) guidance for hurricane research, IEEE Systems Journal 10(3),1263-1270, 2015 PDF -
Jellyfish motion primitives
 I. J. Sledge, M. Krieg, D. Lipinski, and K. Mohseni, Identifying and modeling motion primitives for the hydromedusae Sarsia tubulosa and Aequorea victoria, Bionispiration and Biomimetics, 10(6), 066001, 2015 PDF
I. J. Sledge, M. Krieg, D. Lipinski, and K. Mohseni, Identifying and modeling motion primitives for the hydromedusae Sarsia tubulosa and Aequorea victoria, Bionispiration and Biomimetics, 10(6), 066001, 2015 PDF -
Stability Modes of
Low-Aspect-Ratio Wings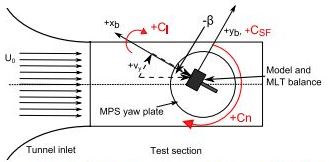 M. Shields and K. Mohseni, Inherent Stability Modes of Low-Aspect-Ratio Wings, Journal of Aircraft, 52(1), 141-155, 2015 PDF
M. Shields and K. Mohseni, Inherent Stability Modes of Low-Aspect-Ratio Wings, Journal of Aircraft, 52(1), 141-155, 2015 PDF -
Far-field momentum flux
for axisymmetric synthetic jets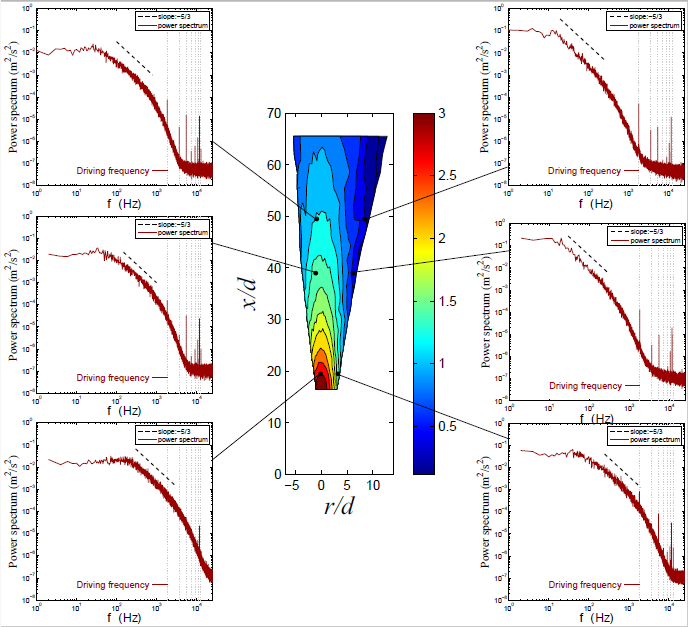 X. Xia and K. Mohseni, Far-field Momentum Flux of High-frequency Axisymmetric Synthetic Jets, Physics of Fluids, 27(11), 115101, 2015 PDF
X. Xia and K. Mohseni, Far-field Momentum Flux of High-frequency Axisymmetric Synthetic Jets, Physics of Fluids, 27(11), 115101, 2015 PDF -
SWAMP MAV; V2.0
 New version of MAV
New version of MAV -
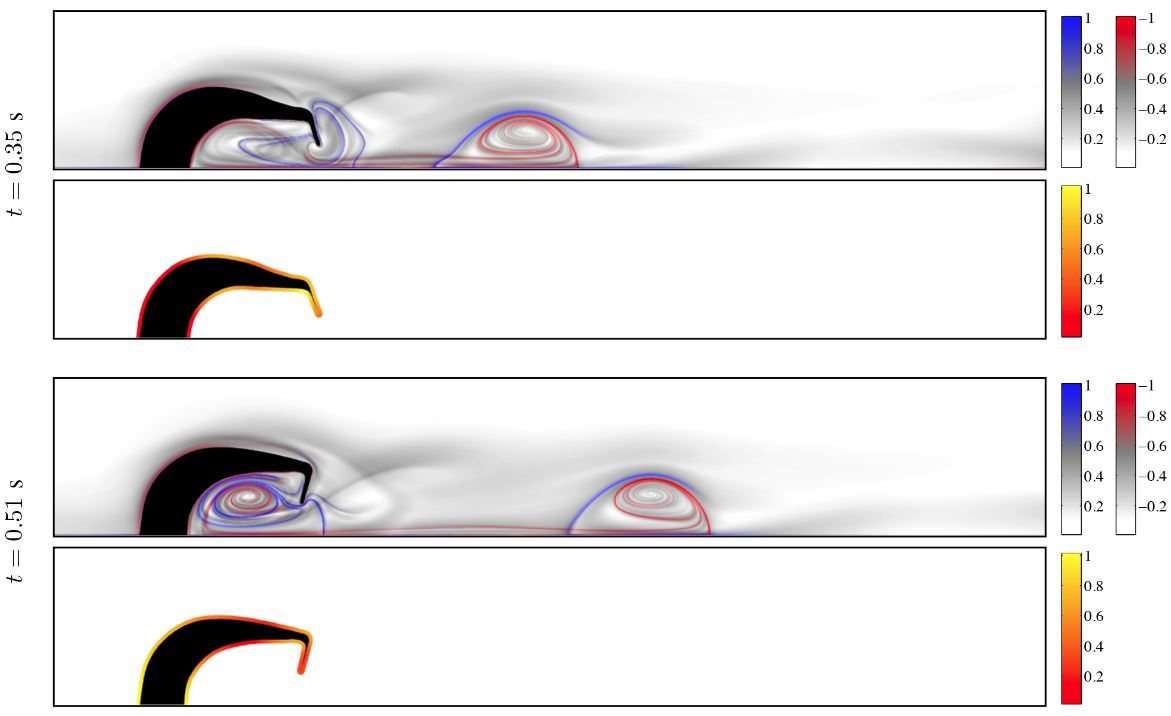
Model of derformable jet
prdoucing bodies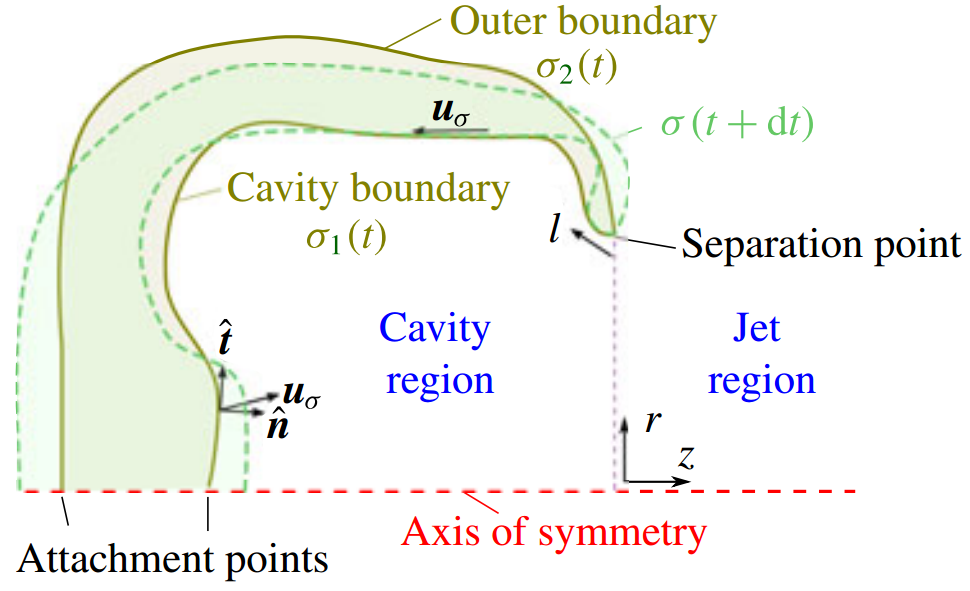 M. Krieg, and K. Mohseni, Pressure and work analysis of unsteady, deformable, axisymmetric, jet producing cavity bodies, J. Fluid Mechanics, 769, 337-368, 2015 PDF
M. Krieg, and K. Mohseni, Pressure and work analysis of unsteady, deformable, axisymmetric, jet producing cavity bodies, J. Fluid Mechanics, 769, 337-368, 2015 PDF -
Increased generation rate of invariants
by intorducing periodic fluid interfaces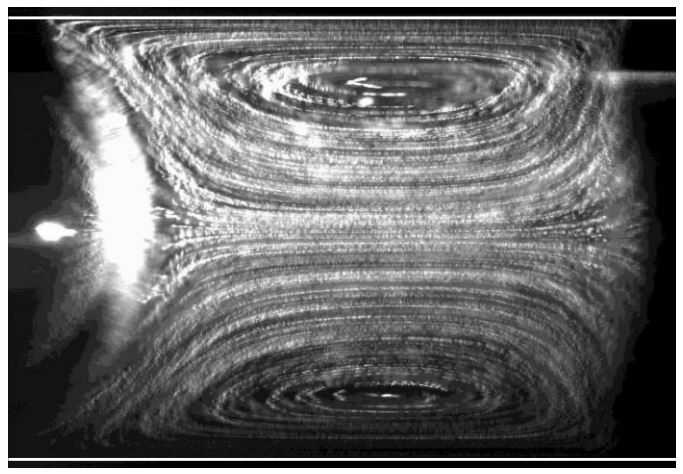 A.C. DeVoria and K. Mohseni, Droplets in an axisymmetric microtube: effects of aspect ratio and fluid interfaces, Physics of Fluids, 27(1), 012002, 2015 PDF
A.C. DeVoria and K. Mohseni, Droplets in an axisymmetric microtube: effects of aspect ratio and fluid interfaces, Physics of Fluids, 27(1), 012002, 2015 PDF
-
-
2014
-
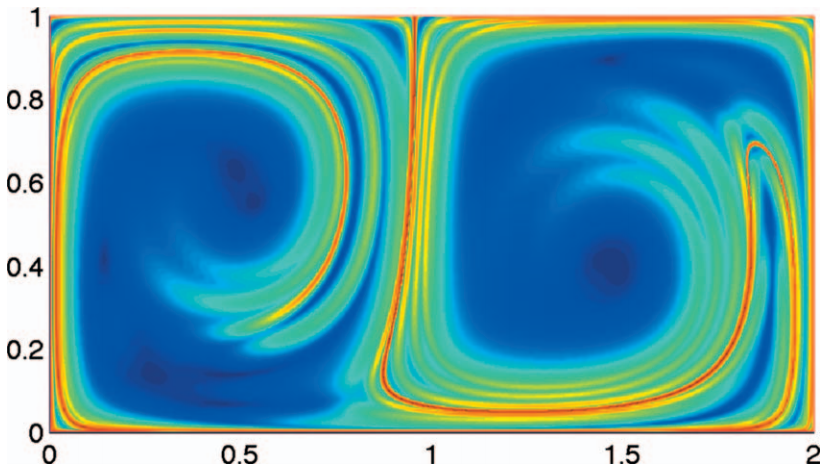
Discovery of a new Checkerboard structure
in Loop Eddies and Hurricanes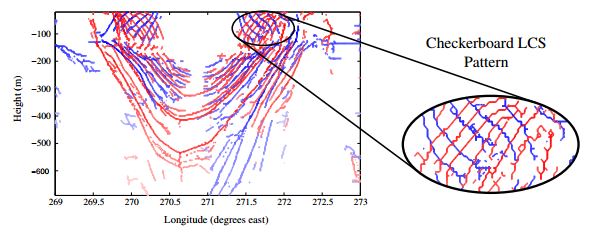 D. Lipinski and K. Mohseni, Observations on the flow structures and transport in a simulated warm-core ring in the Gulf of Mexico, Ocean Dynamics, 64:79-88, Springer, 2014 PDF
D. Lipinski and K. Mohseni, Observations on the flow structures and transport in a simulated warm-core ring in the Gulf of Mexico, Ocean Dynamics, 64:79-88, Springer, 2014 PDF -
Synthetic Jets: Fundamentals
and Applications Book
-
Modeling and experimental
validation for digitized heat transfer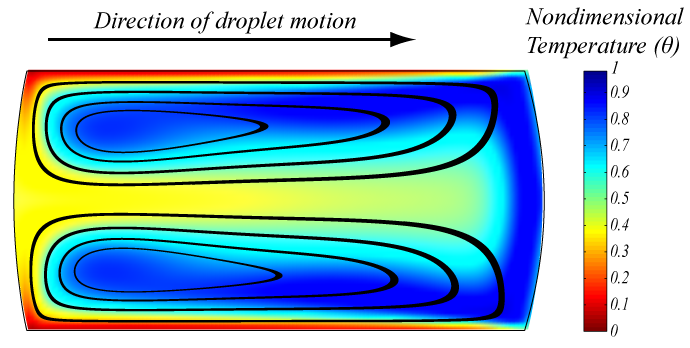 P. Zhang and K. Mohseni, A unified model for digitized heat transfer in a microchannel, International Journal of Heat and Mass Transfer, 78, 393-407, 2014 PDF
P. Zhang and K. Mohseni, A unified model for digitized heat transfer in a microchannel, International Journal of Heat and Mass Transfer, 78, 393-407, 2014 PDF -
Online manifold learning
model reduction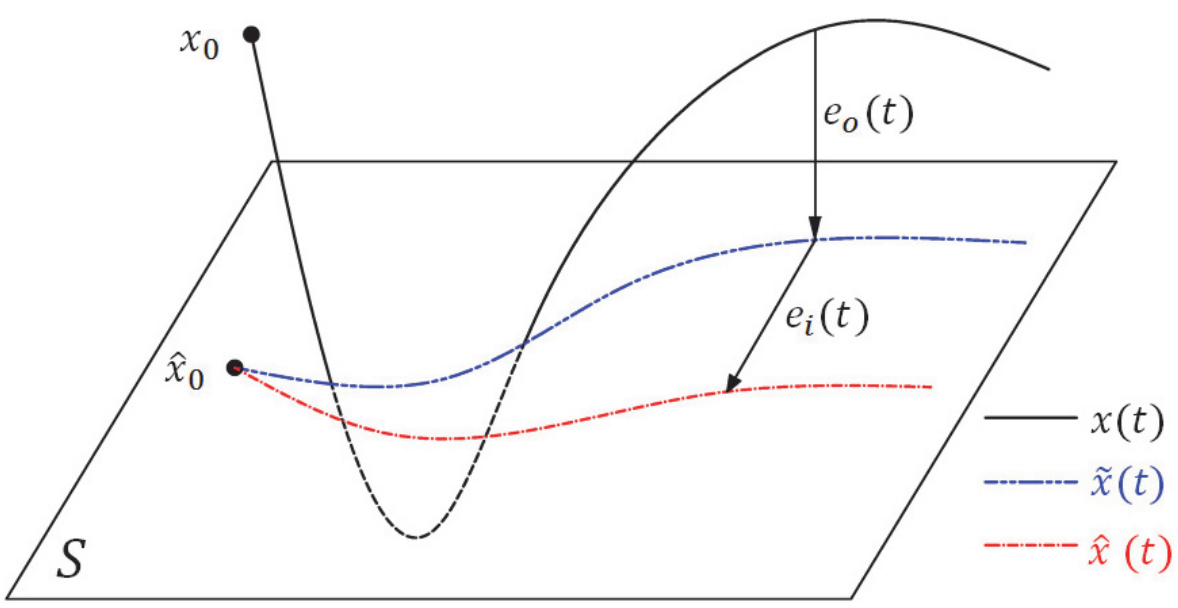 L. Peng and K. Mohseni, An online manifold learning approach for model reduction of dynamical systems, SIAM Journal on Numerical Analysis, 52(4), 1928-1952, 2014 PDF
L. Peng and K. Mohseni, An online manifold learning approach for model reduction of dynamical systems, SIAM Journal on Numerical Analysis, 52(4), 1928-1952, 2014 PDF -
Dynamic data driven simulation
for plane characterization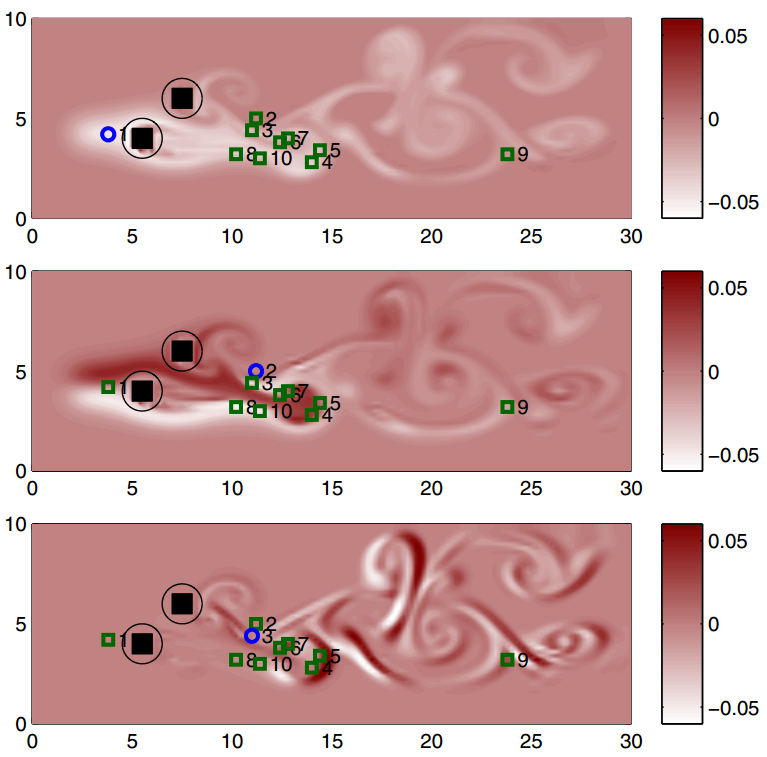 L. Peng, D. Lipinski and K. Mohseni, Dynamic data driven application system for plume estimation using UAVs, Journal of Intelligent and Robotic Systems, 74, 421-436, 2014 PDF
L. Peng, D. Lipinski and K. Mohseni, Dynamic data driven application system for plume estimation using UAVs, Journal of Intelligent and Robotic Systems, 74, 421-436, 2014 PDF
-
-
2013
-
Roll stall for low aspect ratio wings
 M. Shields and K. Mohseni, Roll stall for low aspect ratio wings, J. of Aircraft, 50(4), 1060-1069, 2013 PDF
M. Shields and K. Mohseni, Roll stall for low aspect ratio wings, J. of Aircraft, 50(4), 1060-1069, 2013 PDF -
Fish lateral line sensory system
for AUV disturbance rejection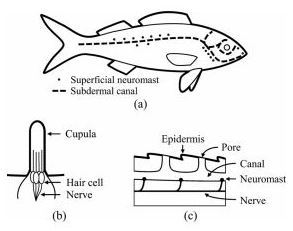 Y. Xu and K. Mohseni, Bio-inspired hydrodynamic force feed forward for autonomous underwater vehicle control, IEEE/ASME Trans. on Mechatronics, 4(19), 1127-1137, August, 2013 PDF
Y. Xu and K. Mohseni, Bio-inspired hydrodynamic force feed forward for autonomous underwater vehicle control, IEEE/ASME Trans. on Mechatronics, 4(19), 1127-1137, August, 2013 PDF -
Correction to Maxwell and Navier Slip
Boundary conditions for unsteady flows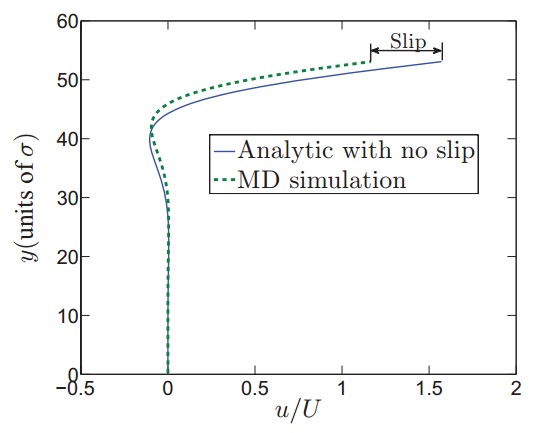 J.J. Thalakkottor and K. Mohseni, Analysis of Boundary Slip in a Flow with an Oscillating Wall, Physical Review E., 87, 033018, 2013 PDF
J.J. Thalakkottor and K. Mohseni, Analysis of Boundary Slip in a Flow with an Oscillating Wall, Physical Review E., 87, 033018, 2013 PDF -
Thrust characterization of a jetting cavity
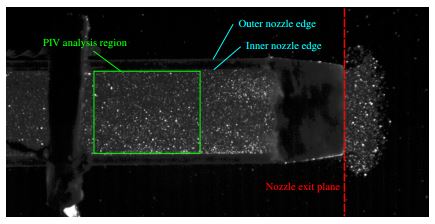 M. Krieg and K. Mohseni, Modelling circulation, impulse, and kinetic energy of starting jets with non-zero radial velocity, J. Fluid Mechanics, 719, 488-526, 2013 PDF
M. Krieg and K. Mohseni, Modelling circulation, impulse, and kinetic energy of starting jets with non-zero radial velocity, J. Fluid Mechanics, 719, 488-526, 2013 PDF -
Unsteady aerodynamics
of a flat plate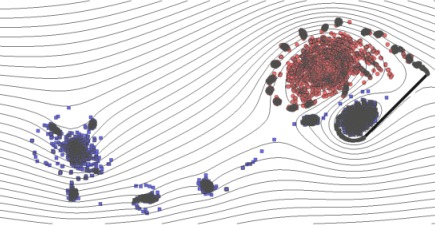 X. Xia and K. Mohseni, Lift evaluation of a two-dimensional pitching flat plate, Physics of Fluids, 25(9), 091901, 2013 PDF
X. Xia and K. Mohseni, Lift evaluation of a two-dimensional pitching flat plate, Physics of Fluids, 25(9), 091901, 2013 PDF
-
-
2012
-
Water Tank Facility
 Our new water tank testing facility is up and running. The 65,000 gallon tank provide unique capabilities for single and multiple vehicle robotics, underwater communications, and networking. LINK
Our new water tank testing facility is up and running. The 65,000 gallon tank provide unique capabilities for single and multiple vehicle robotics, underwater communications, and networking. LINK -
Collagen Fibers in
Squid Mantle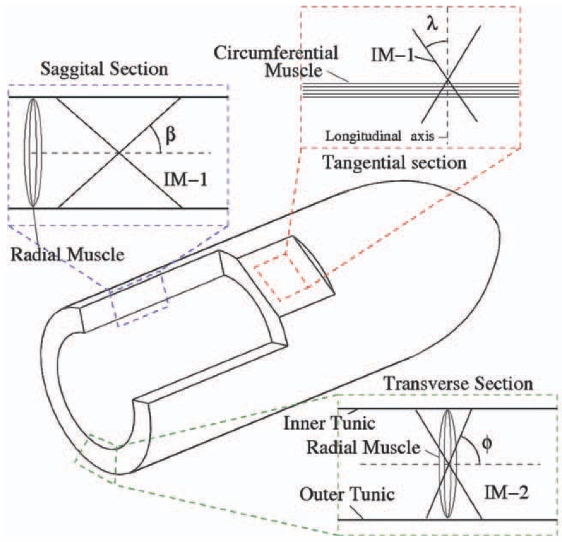 Developed a model for systems of collagen fibers that give a squid mantle its shape and mechanical properties. The model predicts optimal configurations for multiple fiber systems. This study illustrates how the squid’s reinforcing collagen fibers are aligned to provide several locomotory advantages and demonstrates how this complex biological process can be accurately modeled with several simplifying assumptions. PDF
Developed a model for systems of collagen fibers that give a squid mantle its shape and mechanical properties. The model predicts optimal configurations for multiple fiber systems. This study illustrates how the squid’s reinforcing collagen fibers are aligned to provide several locomotory advantages and demonstrates how this complex biological process can be accurately modeled with several simplifying assumptions. PDF -
Model of Fish
Lateral Line Sensing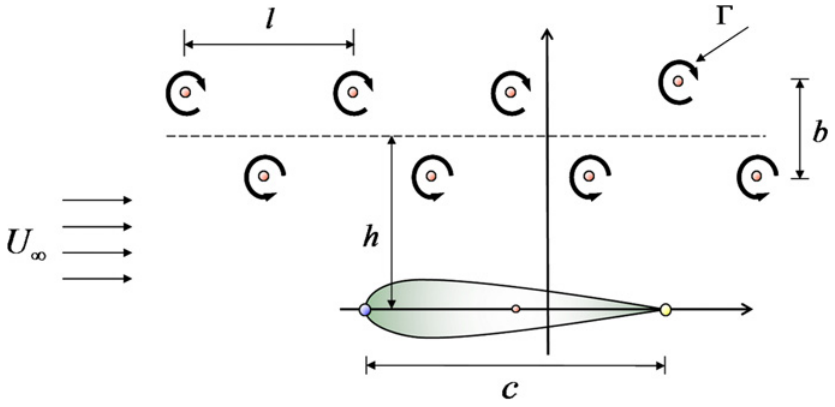 Lateral line trunk canal (LLTC) of a fish is modeled to investigate how it is affected by an external flow field. We found that the main characteristics of a vortex street including the magnitude of vortices, their translational speed, their spacing, their distance from the fish’s body and the angle of the vortex street axis can all be recovered by measuring the velocity distribution along the canal and its changes with time. PDF
Lateral line trunk canal (LLTC) of a fish is modeled to investigate how it is affected by an external flow field. We found that the main characteristics of a vortex street including the magnitude of vortices, their translational speed, their spacing, their distance from the fish’s body and the angle of the vortex street axis can all be recovered by measuring the velocity distribution along the canal and its changes with time. PDF
-
-
2011
-
Group moved to University of Florida

-
Communication link characterization in
a network of autonomous vehicle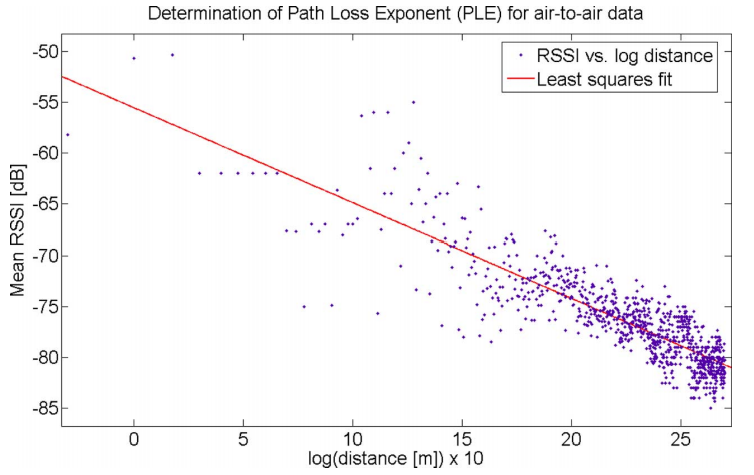 A. Shaw and K. Mohseni, A fluid based coordination of a wireless sensor network of unmanned aerial vehicles: 3D simulation and wireless communication characterization, IEEE Sensors Journal, Issue on Cognitive Sensor Networks, 11(3), 722-736, 2011 PDF
A. Shaw and K. Mohseni, A fluid based coordination of a wireless sensor network of unmanned aerial vehicles: 3D simulation and wireless communication characterization, IEEE Sensors Journal, Issue on Cognitive Sensor Networks, 11(3), 722-736, 2011 PDF -
Development of CephaloBot
autonomous underwater vehicle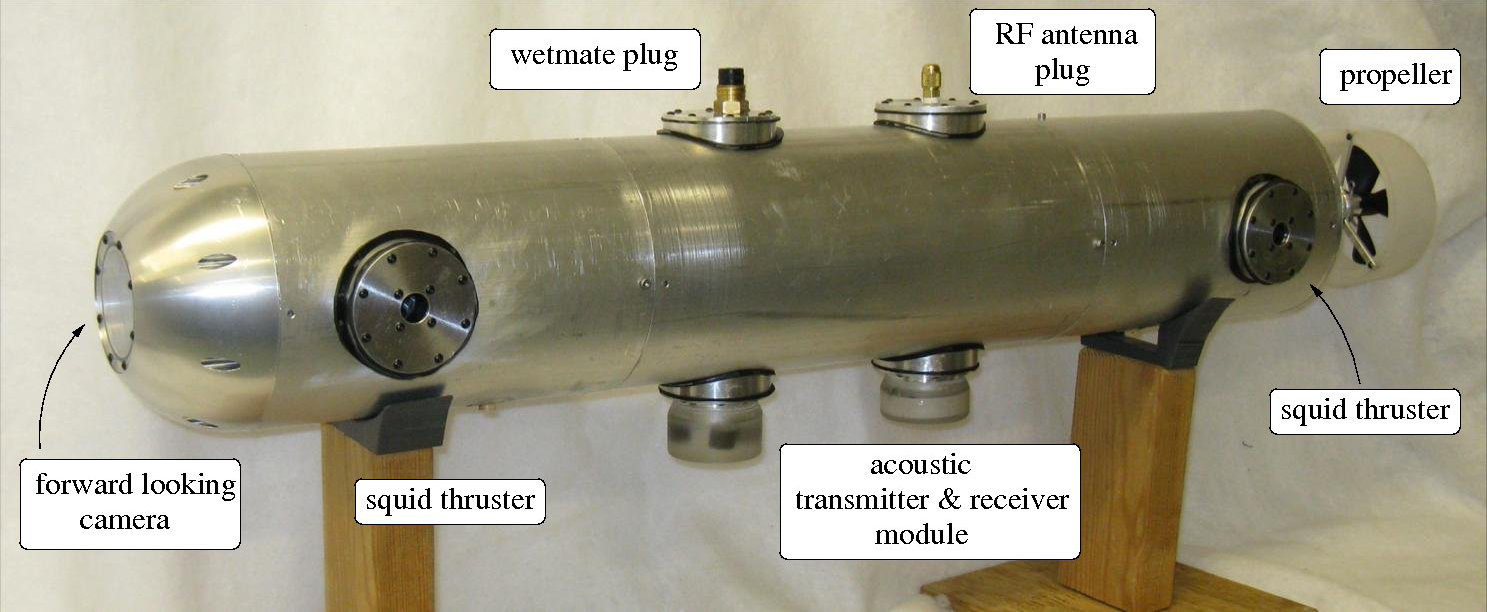 M. Krieg, P. Klein, R. Hodgkinson, and K. Mohseni, A hybrid class underwater vehicle: Bioinspired propulsion, embedded system, and acoustic communication and localization system, Marine Technology Society Journal, 45(4), 153-164, 2011. PDF
M. Krieg, P. Klein, R. Hodgkinson, and K. Mohseni, A hybrid class underwater vehicle: Bioinspired propulsion, embedded system, and acoustic communication and localization system, Marine Technology Society Journal, 45(4), 153-164, 2011. PDF -
Optimal trajectory planning in strong back-
ground flow using master-slave control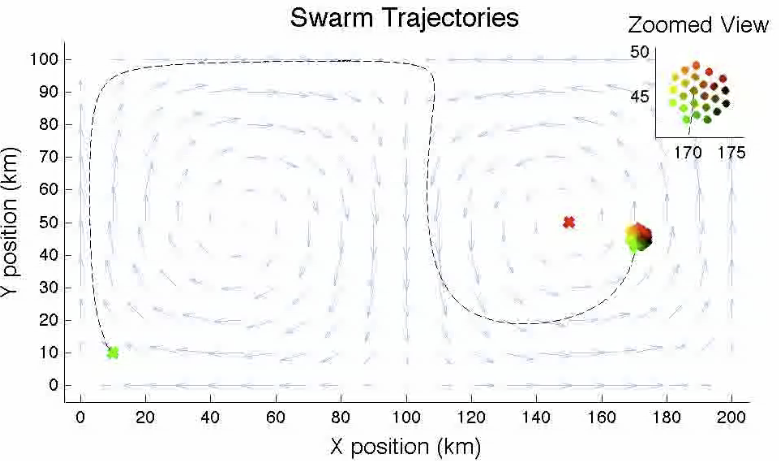 D. Lipinski and K. Mohseni, A master-slave fluid cooperative control algorithm for optimal trajectory planning, 2011 IEEE International Conference on Robotics and Automation (ICRA), pp. 3347-3351. Shanghai, China, 9-13 May 2011.
D. Lipinski and K. Mohseni, A master-slave fluid cooperative control algorithm for optimal trajectory planning, 2011 IEEE International Conference on Robotics and Automation (ICRA), pp. 3347-3351. Shanghai, China, 9-13 May 2011.
-
-
2010
-
Leading edge vortex detection in a
flapping model hummingbird wing E. Swanton, B.A. Vanier, and K. Mohseni, Flow visualization and wall shear stress of a flapping model hummingbird wing, Experiments in Fluids, DOI 10.1007/s00348-010-0832-1, 2010. PDF
E. Swanton, B.A. Vanier, and K. Mohseni, Flow visualization and wall shear stress of a flapping model hummingbird wing, Experiments in Fluids, DOI 10.1007/s00348-010-0832-1, 2010. PDF -
Fast LCS algorithm
 D. Lipinski and K. Mohseni, A ridge tracking algorithm and error estimate for efficient computation of Lagrangian coherent structures, Chaos, 20, 017504, 2010. PDF
D. Lipinski and K. Mohseni, A ridge tracking algorithm and error estimate for efficient computation of Lagrangian coherent structures, Chaos, 20, 017504, 2010. PDF -
Squid thrusters characterization and
application for underwater robot parking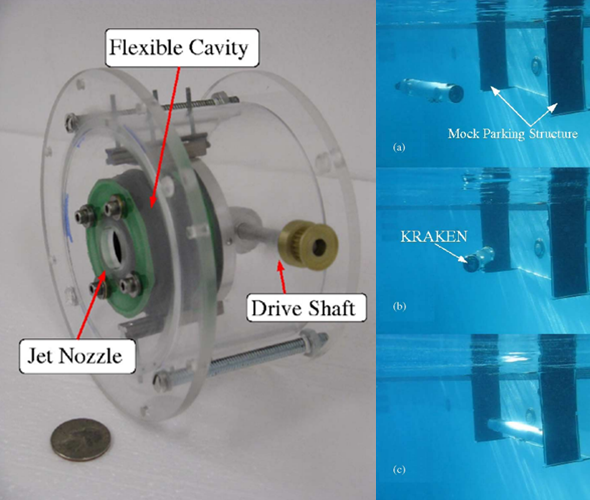 M. Krieg and K. Mohseni, Dynamic modeling and control of biologically inspired vortex ring thrusters for underwater robot locomotion, IEEE Transactions on Robotics, 26(3), 542-554 2010. PDF
M. Krieg and K. Mohseni, Dynamic modeling and control of biologically inspired vortex ring thrusters for underwater robot locomotion, IEEE Transactions on Robotics, 26(3), 542-554 2010. PDF
-
-
2001
-
Group created at University of Colorado Boulder
-